RWMutex的实现机制
前面我们聊了互斥锁Mutex,所谓读写锁RWMutex,完整的表述应该是读写互斥锁,可以说是Mutex的一个改进版,在某些场景下可以发挥更加灵活的控制能力,比如:读取数据频率远远大于写数据频率的场景。
例如,程序中写操作少而读操作多,简单的说,如果执行过程是1次写然后N次读的话,使用Mutex,这个过程将是串行的,因为即便N次读操作互相之间并不影响,但也都需要持有Mutex后才可以操作。如果使用读写锁,多个读操作可以同时持有锁,并发能力将大大提升。
实现读写锁需要解决如下几个问题:
写锁需要阻塞写锁:一个协程拥有写锁时,其他协程写锁定需要阻塞
写锁需要阻塞读锁:一个协程拥有写锁时,其他协程读锁定需要阻塞
读锁需要阻塞写锁:一个协程拥有读锁时,其他协程写锁定需要阻塞
读锁不能阻塞读锁:一个协程拥有读锁时,其他协程也可以拥有读锁
读 写 读 Y N 写 N N
下面我们将按照这个思路,即读写锁如何解决这些问题的,来分析读写锁的实现。
读写锁基于Mutex实现,实现源码非常简单和简洁,又有一定的技巧在里面。
读写锁数据结构
类型定义
源码包src/sync/rwmutex.go:RWMutex定义了读写锁数据结构:
type RWMutex struct {
w Mutex //用于控制多个写锁,获得写锁首先要获取该锁,如果有一个写锁在进行,那么再到来的写锁将会阻塞于此
writerSem uint32 //写阻塞等待的信号量,最后一个读者释放锁时会释放信号量
readerSem uint32 //读阻塞的协程等待的信号量,持有写锁的协程释放锁后会释放信号量
readerCount int32 //记录读者个数
readerWait int32 //记录写阻塞时读者个数
}由以上数据结构可见,读写锁内部仍有一个互斥锁,用于将两个写操作隔离开来,其他的几个都用于隔离读操作和写操作。
下面我们简单看下RWMutex提供的4个接口,后面再根据使用场景具体分析这几个成员是如何配合工作的。
接口定义
RWMutex提供4个简单的接口来提供服务:
- RLock():读锁定
- RUnlock():解除读锁定
- Lock(): 写锁定,与Mutex完全一致
- Unlock():解除写锁定,与Mutex完全一致
实现
Lock()实现逻辑
写锁定操作需要做两件事:
- 获取互斥锁
- 阻塞等待所有读操作结束(如果有的话)
所以func (rw *RWMutex) Lock()接口实现流程如下图所示:

源码实现
func (rw *RWMutex) Lock() {
// First, resolve competition with other writers.
rw.w.Lock()
// Announce to readers there is a pending writer.
r := atomic.AddInt32(&rw.readerCount, -rwmutexMaxReaders) + rwmutexMaxReaders
// Wait for active readers.
if r != 0 && atomic.AddInt32(&rw.readerWait, r) != 0 {
runtime_SemacquireMutex(&rw.writerSem, false, 0)
}
}首先调用互斥锁的 lock,获取到互斥锁之后,
atomic.AddInt32(&rw.readerCount, -rwmutexMaxReaders)调用这个函数阻塞后续的读操作- 如果计算之后当前仍然有其他 goroutine 持有读锁,那么就调用
runtime_SemacquireMutex休眠当前的 goroutine 等待所有的读操作完成
Unlock()实现逻辑
解除写锁定要做两件事:
- 唤醒因读锁定而被阻塞的协程(如果有的话)
- 解除互斥锁
所以func (rw *RWMutex) Unlock()接口实现流程如下图所示:

源码实现
func (rw *RWMutex) Unlock() {
// Announce to readers there is no active writer.
r := atomic.AddInt32(&rw.readerCount, rwmutexMaxReaders)
if r >= rwmutexMaxReaders {
race.Enable()
throw("sync: Unlock of unlocked RWMutex")
}
// Unblock blocked readers, if any.
for i := 0; i < int(r); i++ {
runtime_Semrelease(&rw.readerSem, false, 0)
}
}解锁的操作,会先调用 atomic.AddInt32(&rw.readerCount, rwmutexMaxReaders) 将恢复之前写入的负数,然后根据当前有多少个读操作在等待,循环唤醒
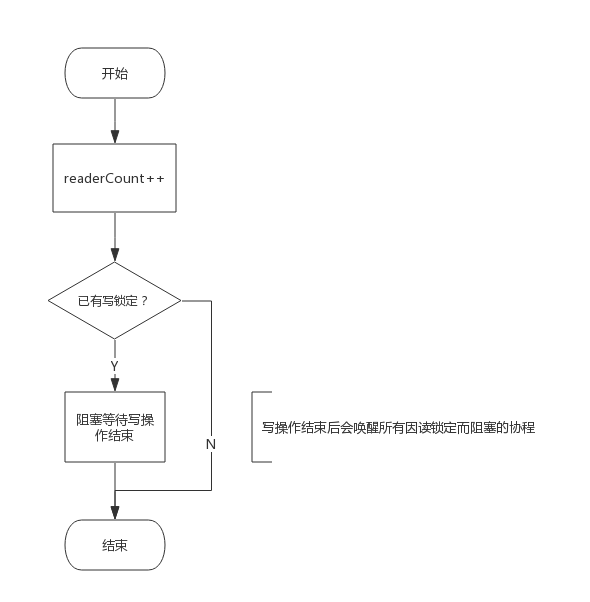
RLock()实现逻辑
读锁定需要做两件事:
- 增加读操作计数,即readerCount++
- 阻塞等待写操作结束(如果有的话)
所以func (rw *RWMutex) RLock()接口实现流程如下图所示:
源码实现
func (rw *RWMutex) RLock() {
if atomic.AddInt32(&rw.readerCount, 1) < 0 {
// A writer is pending, wait for it.
runtime_SemacquireMutex(&rw.readerSem, false, 0)
}
}首先是读锁, atomic.AddInt32(&rw.readerCount, 1) 调用这个原子方法,对当前在读的数量加一,如果返回负数,那么说明当前有其他写锁,这时候就调用 runtime_SemacquireMutex 休眠 goroutine 等待被唤醒
RUnlock()实现逻辑
解除读锁定需要做两件事:
- 减少读操作计数,即readerCount–
- 唤醒等待写操作的协程(如果有的话)
所以func (rw *RWMutex) RUnlock()接口实现流程如下图所示:
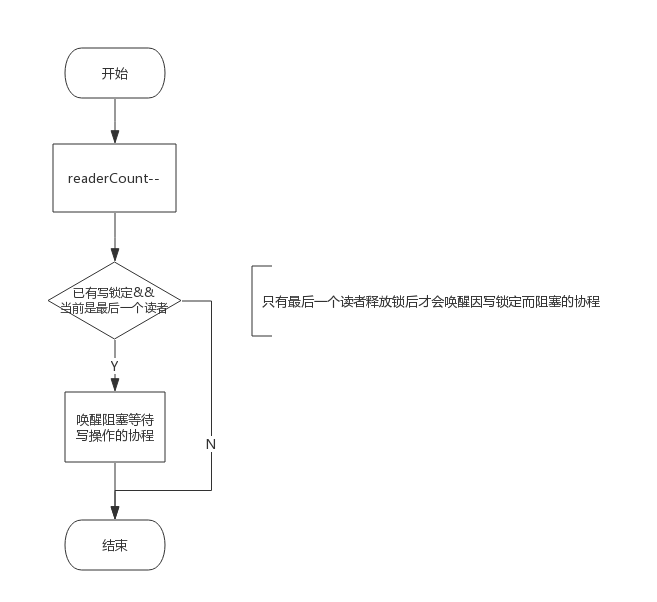
注意:即便有协程阻塞等待写操作,并不是所有的解除读锁定操作都会唤醒该协程,而是最后一个解除读锁定的协程才会释放信号量将该协程唤醒,因为只有当所有读操作的协程释放锁后才可以唤醒协程。
源码实现
func (rw *RWMutex) RUnlock() {
if r := atomic.AddInt32(&rw.readerCount, -1); r < 0 {
// Outlined slow-path to allow the fast-path to be inlined
rw.rUnlockSlow(r)
}
}解锁的时候对正在读的操作减一,如果返回值小于 0 那么说明当前有在写的操作,这个时候调用 rUnlockSlow 进入慢速通道
func (rw *RWMutex) rUnlockSlow(r int32) {
if r+1 == 0 || r+1 == -rwmutexMaxReaders {
race.Enable()
throw("sync: RUnlock of unlocked RWMutex")
}
// A writer is pending.
if atomic.AddInt32(&rw.readerWait, -1) == 0 {
// The last reader unblocks the writer.
runtime_Semrelease(&rw.writerSem, false, 1)
}
}被阻塞的准备读的 goroutine 的数量减一,readerWait 为 0,就表示当前没有正在准备读的 goroutine 这时候调用 runtime_Semrelease 唤醒写操作
场景分析
上面我们简单看了下4个接口实现原理,接下来我们看一下是如何解决前面提到的几个问题的。
写操作是如何阻止写操作的
读写锁包含一个互斥锁(Mutex),写锁定必须要先获取该互斥锁,如果互斥锁已被协程A获取(或者协程A在阻塞等待读结束),意味着协程A获取了互斥锁,那么协程B只能阻塞等待该互斥锁。
所以,写操作依赖互斥锁阻止其他的写操作。
写操作是如何阻止读操作的
这个是读写锁实现中最精华的技巧。
我们知道RWMutex.readerCount是个整型值,用于表示读者数量,不考虑写操作的情况下,每次读锁定将该值+1,每次解除读锁定将该值-1,所以readerCount取值为[0, N],N为读者个数,实际上最大可支持2^30个并发读者。
当写锁定进行时,会先将readerCount减去2^30,从而readerCount变成了负值,此时再有读锁定到来时检测到readerCount为负值,便知道有写操作在进行,只好阻塞等待。而真实的读操作个数并不会丢失,只需要将readerCount加上2^30即可获得。
所以,写操作将readerCount变成负值来阻止读操作的。
读操作是如何阻止写操作的
读锁定会先将RWMutext.readerCount加1,此时写操作到来时发现读者数量不为0,会阻塞等待所有读操作结束。
所以,读操作通过readerCount来将来阻止写操作的。
为什么写锁定不会被饿死
我们知道,写操作要等待读操作结束后才可以获得锁,写操作等待期间可能还有新的读操作持续到来,如果写操作等待所有读操作结束,很可能被饿死。然而,通过RWMutex.readerWait可完美解决这个问题。
写操作到来时,会把RWMutex.readerCount值拷贝到RWMutex.readerWait中,用于标记排在写操作前面的读者个数。
前面的读操作结束后,除了会递减RWMutex.readerCount,还会递减RWMutex.readerWait值,当RWMutex.readerWait值变为0时唤醒写操作。
所以,写操作就相当于把一段连续的读操作划分成两部分,前面的读操作结束后唤醒写操作,写操作结束后唤醒后面的读操作。如下图所示:

参考文章:

